

# La robotique plurielle
- les différentes familles de robots industriels
- De la robotique à la cobotique
- Robot / Cobot : Comment choisir ?
- Focus sur : cobotique et sécurité
parution : édition 2024
niveau de lecture : facile
public concerné : tout public
durée de lecture : 7 mn
LES DIFFERENTES FAMILLES DE ROBOTS INDUSTRIELS
"S'il te plait, décris moi un robot.
Ces dernières années l'offre constructeur s'est particulièrement étoffée couvrant ainsi de multiples applications. FANUC, par exemple, acteur majeur du marché annonce plus de 100 références à son catalogue.
Par soucis de simplification, il est d'usage de classer les robots selon leur morphologie.
On distinguera ainsi 3 grandes familles :
- SCARA
- Delta ( hexapodes)
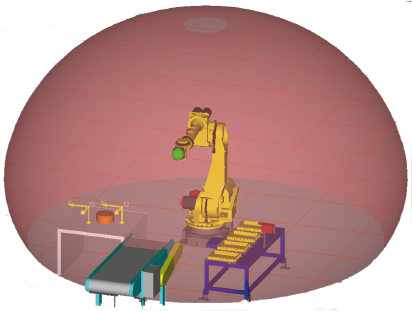
- Poly-articulés
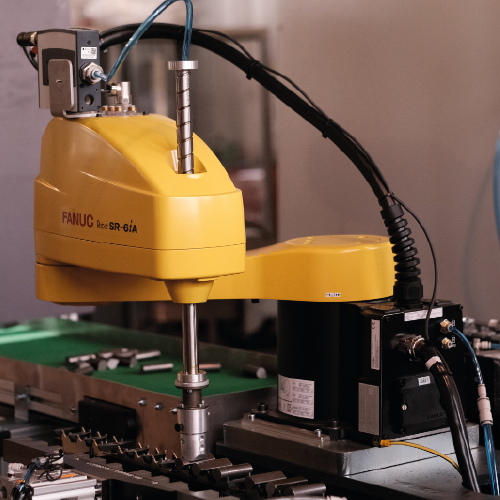
Les robots SCARA sont majoritairement utilisés pour des applications de "Pick and place" acceptant des cadences élevées. La manipulation de pièces se fait sur un plan en raison de leur enveloppe de travail cylindrique.

Grâce à leurs 6 axes de liberté, les robots poly-articulés sont très polyvalents. Ils se déclinent en une large gamme (allant du robot collaboratif au gros porteur) et répondent à de multiples applications de manipulation ou de process.
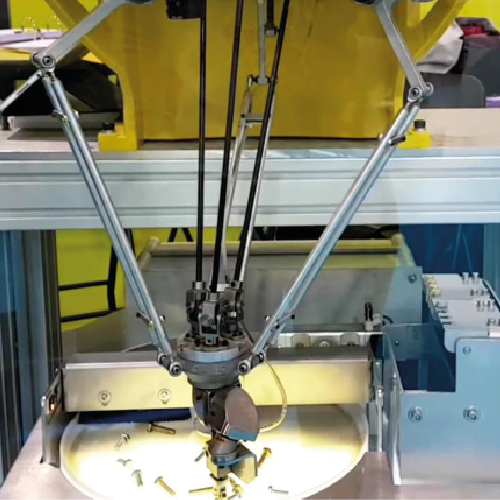
Les robots delta (hexapodes) sont utilisés pour des applications de type "pick and place" à haute vitesse pour des produits petits et légers. Le robot Delta est placé au dessus des produits qu'il prélève.

EQUIPEMENTS COMPLEMENTAIRES
Du fait de leur morphologie, chaque famille de robots a une zone de travail et des capacités de charge différentes. Ainsi par exemple les robots de type SCARA et Delta ne sont pas adaptés à des charge lourdes alors que les robots poly-articulés couvrent une gamme de poids allant de quelques grammes a plusieurs tonne. Les performances en vitesse et accélération des robots sont corrélées à la charge qu'ils transportent. Elles sont reprises et détaillées dans les diagrammes de charge fournis par les constructeurs.
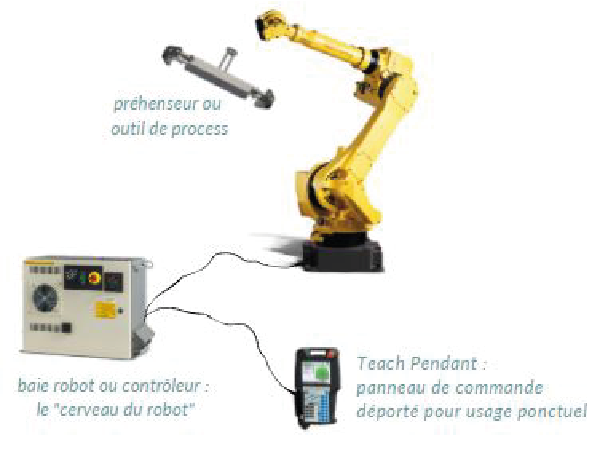



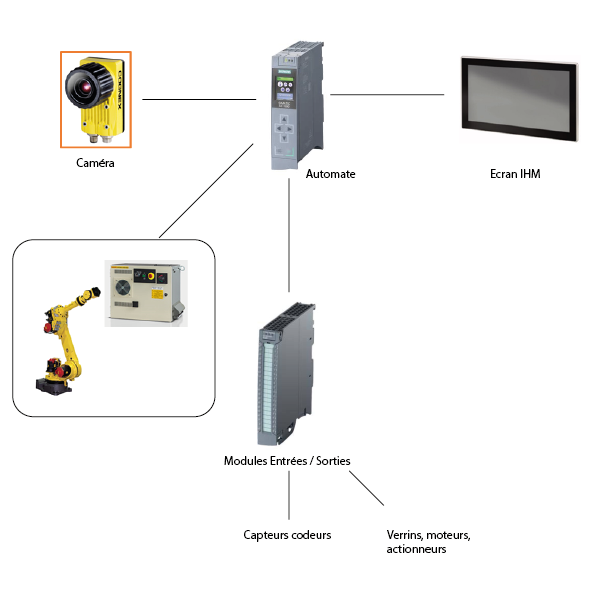
INTÉGRATION AVEC SON ENVIRONNEMENT
Dans le milieu industriel, un robot est une entité qui interagit avec son environnement doit être connecté à des systèmes extérieurs : automates, réseaux internes… Son architecture et le choix des protocoles de communication se fera en fonction des équipements associés et/ou des habitudes du client
" S'il te plaît, c'est quoi la différence entre...
Robot
D'après la norme NF EN ISO 10218-1., c'est un bras manipulateur programmable destiné à des applications multiples. Il évolue sur au moins trois axes et peut être fixe ou mobile. Un robot n'est pas considéré comme une machine à part entière mais comme une quasi-machine, dès lors qu'il est vendu sans outils et sans application dédiée.
Système Robot
D'après la norme NF EN ISO 10218-1. C'est un robot complété par tous les équipements externes (outils, axes externes, machines, etc.) qui lui permettent d'accomplir sa tâche. Un système robot constitue donc une machine au sens de la directive 2006/42/CE.
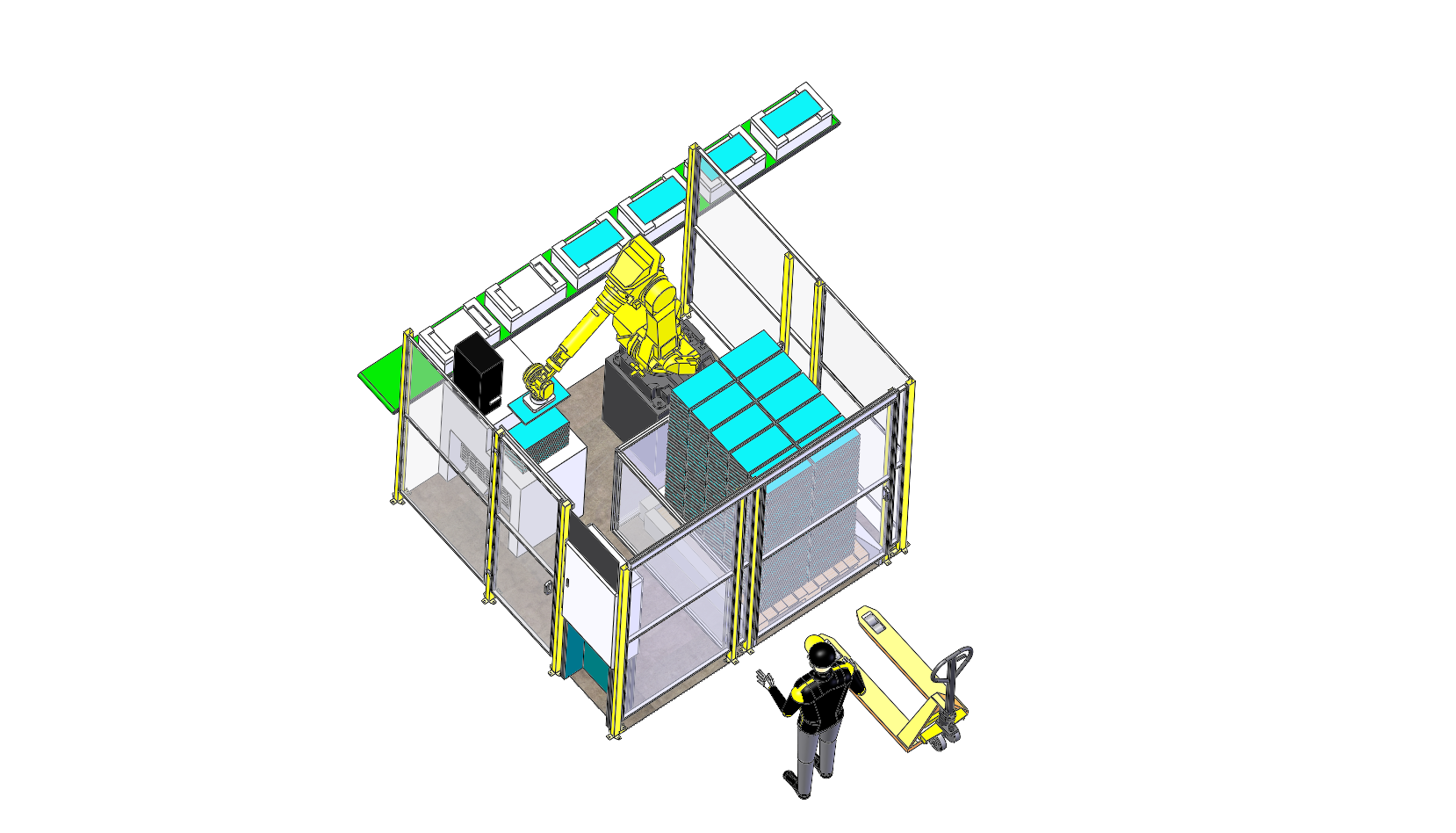
Cellule Robotique ou îlot robotisé
D'après la norme NF EN ISO 10218-2. Il s'agit d'un ou de plusieurs systèmes robots complétés par les mesures de prévention adéquates. La mise en œuvre de la cellule robotique nécessite la définition claire de l'espace maximal d'évolution du système robot, de l'espace partagé (appelé également espace de travail collaboratif) et de l'espace contrôlé (protection périmétrique).
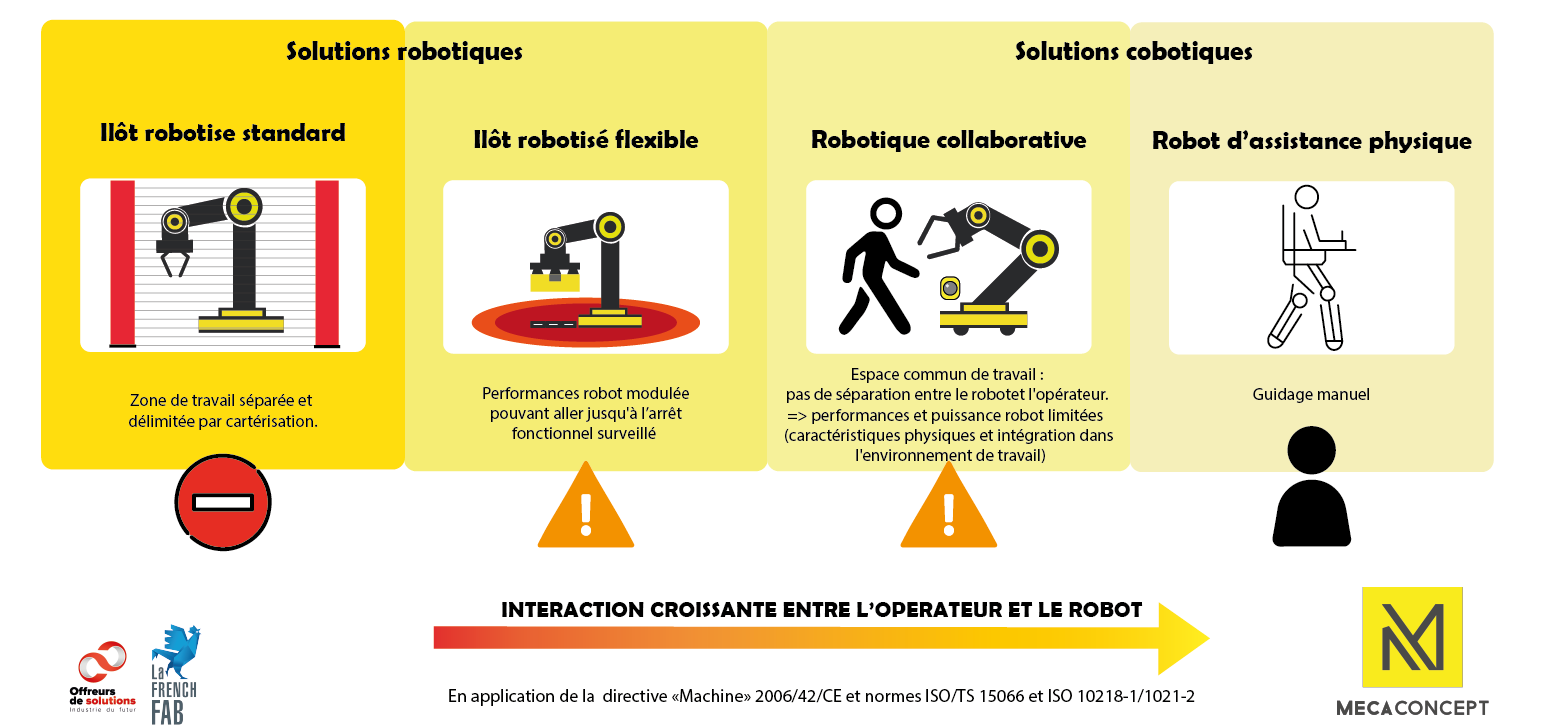
Ilôt robotisé
Dans les solutions robotiques conventionnelles, le robot réalise les tâches en autonomie dans une enceinte sécurisée par des grilles ou parfois des dispositifs immatériels de type barrière optique ou scrutateur laser. Par soucis de sécurité, l'ouverture impromptu de l'ilôt ou le franchissement de la barrière dite "immatérielle" stoppe immédiatement le cycle du robot selon une "procédure d'arrêt d'urgence". Le redémarrage du cycle nécessite alors une intervention humaine selon une procédure bien établie connue.
Ilôt robotisé flexible
L'adaptation du mode de fonctionnement robot est liée à la proximité de l'opérateur : plus ce dernier est proche, plus le robot fonctionne à vitesse réduite jusqu'à le cas échéant suspendre son activité selon une "procédure d'arrêt fonctionnel surveillé".
Solution de robotique collaborative
Susceptibles d'évoluer dans un espace de travail partagé Homme/machine, un robot collaboratif est équipé d'éléments de sécurité intrinsèques à son fonctionnement comme des limiteurs de puissance et de force. Puis, à cela, viendront s'ajouter d'autres mesures de sécurité conditionnées par l'application à laquelle il est destiné.
Avant toute intégration robotique, l'intégrateur réalisera une analyse de risques afin de déterminer les mesures de sécurité à mettre en place en fonction des risques potentiels détectés.
CE SUJET VOUS A INTÉRESSÉ?
Un projet ? Une idée ?
PARTAGER CET ARTICLE