

# La robotique plurielle suite
- les différentes familles de robots industriels
- De la robotique à la cobotique
- Robot / Cobot : Comment choisir ?
- Introduction à la sécurité en robotique collaborative
parution : nouvelle édiion 2024
niveau de lecture : facile
public concerné : tout public
durée de lecture : 4 mn
DE LA ROBOTIQUE A LA COBOTIQUE
MISE EN PERSPECTIVE DE L'EVOLUTION DE LA ROBOTIQUE VERS LA ROBOTIQUE COLLABORATIVE
Hier encore l'automatisation et la robotisation ont longtemps suscité de nombreuses craintes comme "Le robot destructeur d'emploi" ou "le robot annihilateur de la pensée et de l'action humaine". Désormais, la robotisation est perçue comme un levier efficace pour maintenir la compétivité et l'emploi en France voir même relocaliser certaines activités.
Aujourd'hui, grâce aux évolutions technologiques, la tendance n'est plus d'opposer l'homme à la machine. Il s'agit d'aller vers une interaction croissante en conjuguant simultanément les forces d'un système robotisé (répétabilité, précision…) à l'intelligence métier des opérateurs (réactivité aux imprévus, prise de décision…).
Dans cette optique, la robotique collaborative est justement perçue comme le moyen de réconcilier l'Homme et le robot et de constituer ainsi un système flexible et intelligent. Elle séduit également les industriels par sa facilité d'intégration, son ROI rapide et sa capacité à être redéployée facilement. En d'autre terme, elle rend l'automatisation plus accessible notamment aux PME.
Est-ce à dire que nous entrons dans le monde du "tout collaboratif"? NON, c'est aller un peu vite en besogne. Certes, la robotique collaborative offre de nouvelles perspectives d'automatisation mais ne répond pas à l'ensemble des attentes et besoins des industriels notamment pour des applications avec des contraintes de temps élevées.
Mais alors, comment faire le bon choix, parmi toutes ces solutions qui se multiplient?
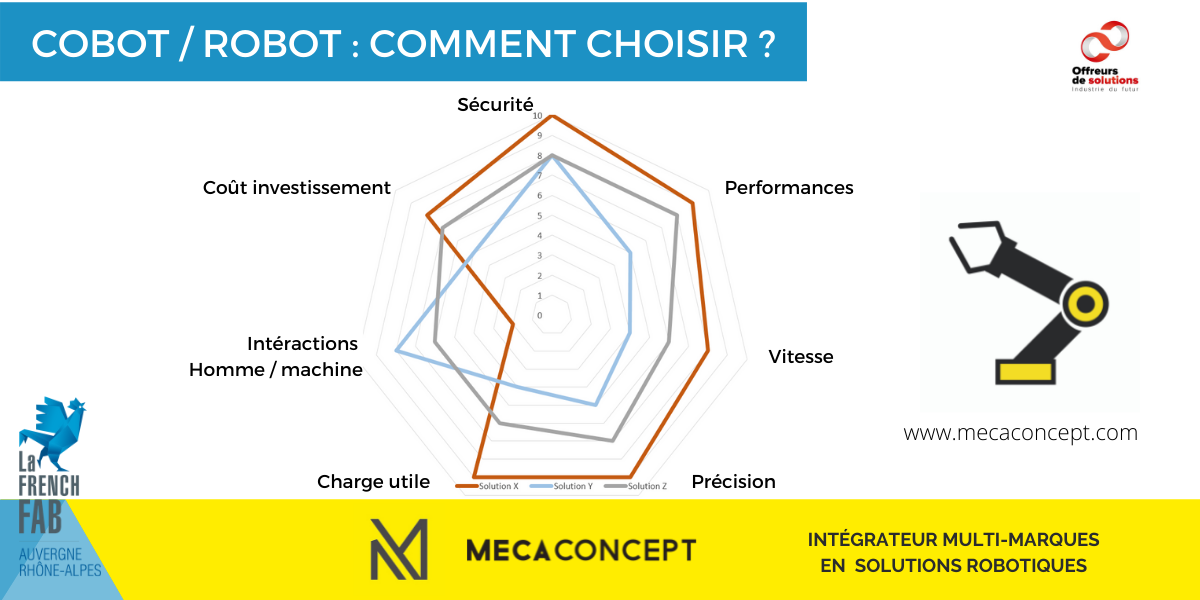
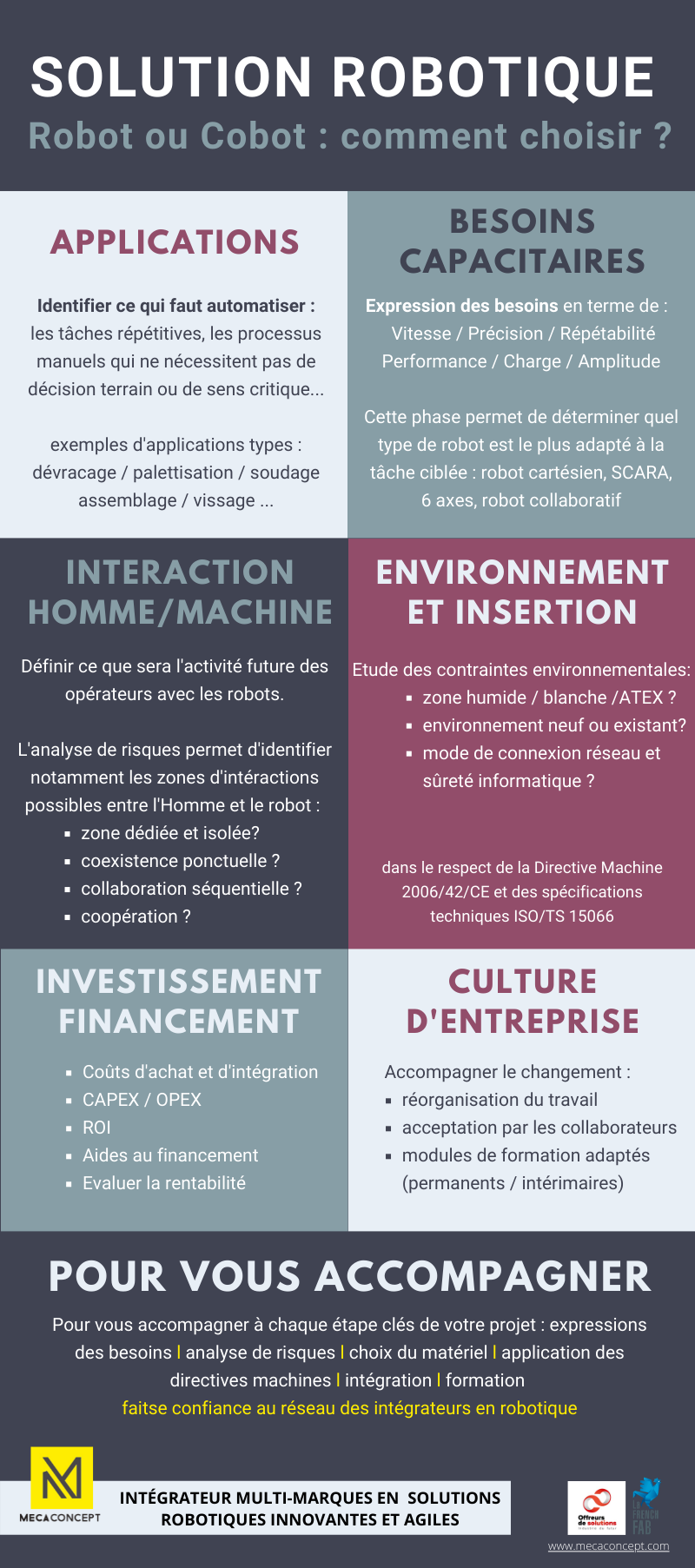
SOLUTION ROBOTIQUE : COMMENT ORIENTER SON CHOIX ?
De nos jours, des applications de process, conditionnement ou palettisation par exemple, peuvent être réalisées, selon les cas, par des cellules robotisées en mode conventionnel ou collaboratif ? Mais alors pourquoi opter pour une solution plutôt qu'une autre ? Quels sont les critères de réflexion qui orientent la décision ?
" Avant toute chose, le besoin de l'industriel doit être clairement établi sous peine de proposer une solution technologique inefficiente. La solution la plus satisfaisante ? Une savante combinaison entre efficacité, faisabilité, robustesse, rentabilité et souplesse d'utilisation."
S.Nivet, président de MECACONCEPT

INTRODUCTION A LA SÉCURITÉ EN ROBOTIQUE COLLABORATIVE
Vous l'aurez compris dès que l'on parle d'intégration robotique, on ne déroge pas à la sécurité ! Dans tous les cas une analyse de risques s'impose ! C'est cette étape incontournable qui permet d'estimer et de hiérarchiser les différents risques associée à l'intégration d'un application robotique dans un environnement de travail. Et cela, même s'il s'agit de robots collaboratifs!
En effet, ce n'est pas parce que le robot est dit "Human friendly" que son application est "safety". Explication : Bien que conçu pour travailler aux côtés des opérateurs, un robot collaboratif peut embarquer des éléments en mouvement susceptibles de présenter un danger (pince non collaborative, pièces manipulées, …)
IDENTIFICATION ET EVALUATION DES RISQUES POTENTIELS
Lors de la conception technique, l'intégrateur ou le client final (s'il tient le tôle d'intégrateur) procède systématiquement à une évaluation des risques dû à la présence de l'Homme dans l'espace de travail du robot. Il recense les dangers potentiels pouvant découler de la machine et des situations associées (robot mais également outils, mouvements, environnement ...)
Une fois ces risques identifiés et hiérarchisés selon leur fréquence et gravité, l'intégrateur met en place des mesures préventives pour garantir la sécurité des opérateurs évoluant dans le périmètre d'action du robot en action.
Pour se faire, l'intégrateur s'appuie sur les exigences et recommandations de la réglementation en vigueur.
"L'analyse de risque est une étape primordiale à tout projet de robotisation. Son objectif est d'identifier les risques potentiels afin de garantir la sécurité des opérateurs."
S.Nivet, président de MECACONCEPT
NORMES - DIRECTIVES ET REFERENTIELS
Tout comme les robots traditionnels, les robots collaboratifs sont considérés comme des "quasi-machines" et doivent répondre aux exigences essentielles de santé et sécurité de la Directive Machine 2006/42/CE puis du tout nouveau règlement (UE) 2023/1230 qui entrera en vigueur le 20 janvier 2027. Les normes internationales NF EN ISO 10218-1 et 10218-2 ont été élaborées pour aider respectivement les fabricants de robots (EN ISO 10218-1) et les intégrateurs (EN ISO 10218-2) à atteindre les objectifs de sécurité fixés.
En complément, la spécification technique ISO/TS 15066 s'intéresse plus particulièrement à la sécurité des robots collaboratifs et traite l'interaction entre l'homme et les robots dans l'industrie.
BON A SAVOIR :
La norme NF EN ISO définit 4 principes majeurs de fonctionnement et de mise en sécurité:
- L'arrêt contrôlé nominal de sécurité du robot
- Le guidage manuel
- La surveillance de la vitesse et de la séparation
- La limitation de la puissance et de la force du robot
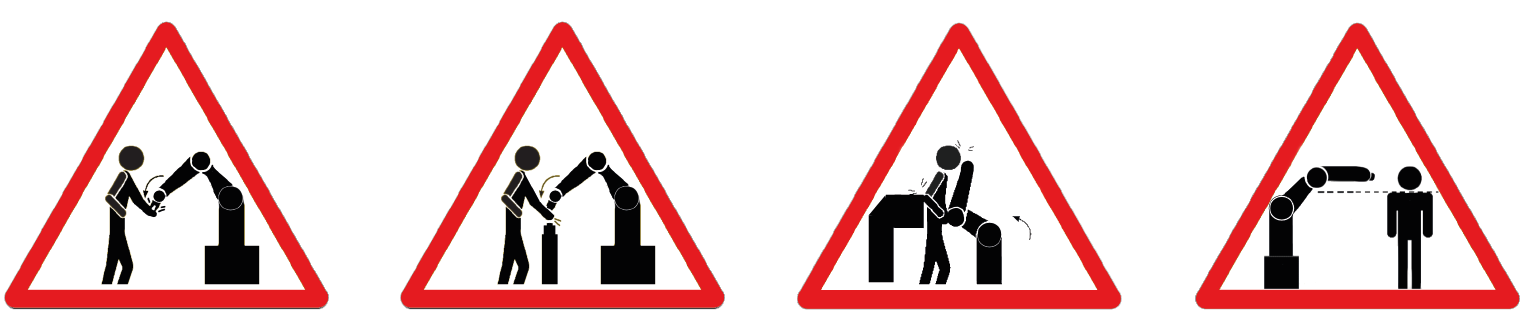
La spécification technique ISO/TS 15066 précise des limites à respecter - notamment de puissance et d'efforts - en fonction des parties du corps humain pouvant potentiellement entrer en contact avec le robot.
Dans les faits, les constructeurs travaillent leurs modèles pour limiter intrinsèquement les risques : Design sans angle anguleux, arrêt d'urgence en cas de chocs supérieur à 15N, vitesse limitée à 250mm/s... Stäubli, quant à lui, ajoute à sa gamme collaborative TX2 des fonctionnalités de sécurité modulaire (SIL3-PLE) permettant de combiner performance et sécurité (réduction de la vitesse jusqu'à l'arrêt de la machine variant en fonction a proximité de l'opérateur).
Au-delà de ces mesures, l'analyse de risques et les mesures préventives qui en découlent, s'avèrent décisives pour assurer une mise en œuvre sécurisée de toute application collaborative. Et petite précision au passage : si un robot collaborative. venait à être reconfiguré pour effectuer une nouvelle tâche, il conviendra de réaliser une nouvelle analyse de risques.
A CONSULTER SANS MODÉRATION:
Guide de prévention à destination des fabricants et des utilisateurs pour la mise en œuvre des applications collaboratives robotisées
Guide créé par le ministère du travail, en collaboration avec de nombreux experts de l'industrie
COBOT / ROBOT
UNE OFFRE QUI SE COMPLÈTE ET S'ENRICHIT
A l’issue de cette exploration sur les différences entre la robotique industrielle et la robotique collaborative, il nous parait important de ne pas opposer ces deux domaines, mais plutôt de reconnaître leur complémentarité grandissante. Les gammes des constructeurs évoluent constamment offrant ainsi une variété de solutions adaptées aux besoins de l'industrie. Cette convergence témoigne de l'essor d'un écosystème diversifié où les avancées technologiques ne se limitent pas aux robots eux-mêmes, mais s'étendent également aux périphériques associés, incluant des capteurs sophistiqués, des caméras intelligentes, des logiciels avancés, et de l'intelligence artificielle. Ce secteur en constante évolution ouvre de nouveaux horizons, permettant une flexibilité opérationnelle sans précédent.
CE SUJET VOUS A INTÉRESSÉ?
Besoin d'une solution robotique ?
PARTAGER CET ARTICLE